

зЩбЏЯТди
ЮшЬЈДѓаЭЛњаЕБлЪЧШчКЮЩшМЦГіРДЕФ
ЮфККжабыЮФЛЏЧјККНжжЊвєЙуГЁЖЋВрЃЌЩшжУгагУгкШКжкбнГіЕФККНжДѓЯЗЬЈЁЃЯЗЬЈВЩгУЗТЙХФОЙЙНЈжўЗчИёЃЌЮшЬЈКѓЧјВМжУСЫ3ЬзСљздгЩЖШЕФДѓаЭЛњаЕБлЃЌЦфЖЫВПАВзАLEDЯдЪОЦСЁЃЭЈЙ§ЛњаЕБлЕФИїжжЖЏзїзщКЯЃЌЪЕЯжLEDБГОАдкећИіЮшЬЈШЮвтПеМфФкЕФЮоЗьЦДНгКЭСЌајЯдЪОЃЌЪЧГЁФкзюГіВЪЕФЩшБИжЎвЛЁЃЛњаЕБлгЩСЂжљЁЂКѓБлЁЂЧАБлЁЂжЇзљBЁЂжЇзљAКЭЯдЪОЦСзщГЩЃЌСЂжљИпЖШ32.02 mЃЌзюДѓБлеЙ27.053 mЃЌЯдЪОЦСУцЛ§11.25 mЁС6.66 mЃЌУПЬзЛњаЕБлжиСПДя270 t зѓгвЁЃЛњаЕБлЩЯЙВга6ИіЙиНкЃЌДгЖЫВПЕНИљВПвРДЮЮЊLEDа§зЊЦСЁЂжЇзљAЁЂжЇзљBЁЂЧАБлЁЂДѓБлКЭжЇГажљЃЌШчЭМ1ЫљЪОЁЃгыФПЧАГЃЙцЕФЮшЬЈЛњаЕЯрБШНЯЃЌЛњаЕБлОпгаЬхЛ§ДѓЁЂздгЩЖШЖрЁЂЙпСПДѓЁЂЫйЖШПьЁЂОЋЖШИпЁЂАВШЋадКЭПЩППадвЊЧѓИпЕШЬиЕуЁЃвђДЫЃЌЖдетжжЬиаЭЮшЬЈЛњаЕЕФПЊЗЂВЛФмВЩгУЦНУцЩшМЦЁЂбљЛњМгЙЄЁЂЯжГЁЪдбщетбљЕФДЋЭГФЃЪНЃЌЖјгІНЈСЂЦфащФтбљЛњФЃаЭЃЌДгЖјНјааШЋЗНЮЛЕФЪ§зжЛЏЩшМЦгыЗжЮіЁЃЭЈЙ§НЈСЂЛњаЕБлЕФащФтбљЛњФЃаЭЃЌНЋЪЕМЪВњЦЗЕФЭтЙлЁЂПеМфЙиЯЕЕШвдЭМаЮЕФЗНЪНЯдЪОЃЌВЂФЃФтЦфдкецЪЕЙЄГЬЬѕМўЯТЕФдЫЖЏбЇЁЂЖЏСІбЇКЭОВСІбЇЬиадЃЌИљОнЬиадЪ§ОнВЛЖЯаое§гХЛЏЩшМЦЗНАИЃЌВЛНіПЩЬсИпЩшМЦаЇТЪЁЂЫѕЖЬЩшМЦжмЦкЁЂНкдМЩшМЦГЩБОЃЌИќживЊЕФЪЧПЩвдИќДѓЯоЖШЕиБЃжЄЩшМЦАВШЋадЃЌЬсИпбљЛњбаЗЂЕФГЩЙІТЪЁЃ
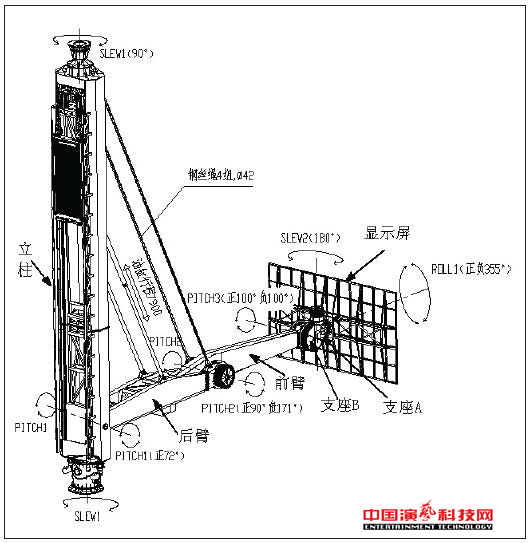
ЭМ1 ЛњаЕБлМђЭМ
1 ащФтбљЛњФЃаЭ
ЛљгкPro/EШэМўЃЈ3D CAD/CAMЯЕЭГЕФБъзМШэМўЃЉЕФБфСПЛЏЩшМЦКЭЪЕЬхдьаЭММЪѕЃЌПЩвдЭъГЩЛњаЕБлИїСуВПМўЕФНЈФЃгыећЬхзАХфЁЃЛњаЕБлЕФжївЊВПМўФЃаЭгаLEDа§зЊЦСЃЈroll#01ЃЉЁЂжЇзљAЃЈslew#02ЃЉЁЂжЇзљBЃЈpitch#03ЃЉЁЂЧАБлЃЈpitch#02ЃЉЁЂДѓБлЃЈpitch#01ЃЉЁЂЬсЩ§ИзЃЈliftЃЉЁЂжЇГажљЃЈslew#01ЃЉЁЂХфжиЃЈbalanceЃЉЕШЁЃФЃаЭЕФзАХфгІзёбецЪЕЖЏзїддђЃЌВЂНјааФЃаЭШЋЗНЮЛЕФИЩЩцМьВщгыаое§ЁЃЦфФЃФтШ§ЮЌФЃаЭШчЭМ2ЫљЪОЁЃPro/EШэМўжаНЈСЂЕФШ§ЮЌФЃаЭгІБЃжЄгыЪЕМЪВњЦЗЕФЭъШЋвЛжТЃЌАќРЈНсЙЙЯИНкЁЂИїВПЗжВФжЪгыУмЖШЕШЃЌетаЉНЋжБНггАЯьЕНЗжЮіЕФОЋШЗадЁЃРћгУPro/EгыЛњаЕЯЕЭГЖЏСІбЇздЖЏЗжЮіШэМўADAMSЃЈAutomatic Dynamic Analysis of MechanicalSystemsЃЉЕФНгПкШэМўMechanism/PROЃЌНЋзМШЗЕФЪЕЬхФЃаЭВПМўЖЈвхЮЊШєИЩИеадЬхВПЗжЃЈPartЃЉЃЌВЂЩшЖЈвЛаЉживЊЕФЙиМќЕуЃЈMarkerЃЉЃЌНЋЩЯЪіШ§ЮЌФЃаЭЭМЕМГіЮЊADAMSЗжЮіПЩгУЕФЮФМўЁЃ
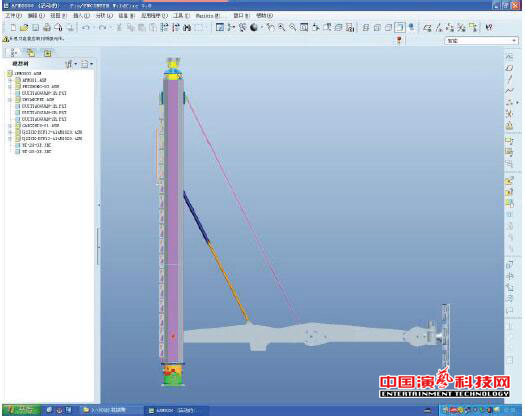
ЭМ2 Pro/EШэМўФЃФтШ§ЮЌФЃаЭЭМ
2 ЖЏСІбЇЗТец
ЖЏСІбЇЗТецЕФвтвхЪЧЬцДњГЃЙцЕФЮяРэбљЛњЪдбщЃЌНЋГЃЙцЮяРэбљЛњЕФЖЏзїЪдбщЁЂЪ§ОнВЩМЏЕШдкМЦЫуЛњЛЗОГЯТЪЕЯжЃЛЗТецЕФзМШЗадШЁОігкШ§ЮЌФЃаЭЁЂЧ§ЖЏВЮЪ§ЕШгыЪЕМЪВњЦЗЕФНгНќГЬЖШЁЃЖЏСІбЇЗТецЕФжївЊФПЕФгаЃКМЦЫуИїЧ§ЖЏЯЕЭГЕФЙІТЪЁЂЪфГіХЄОиЛђЪфГіСІЃЌгУгкДЋЖЏЯЕЭГЕФЩшМЦбЁаЭЃЛМЦЫуИїдЫЖЏЙиНкдкдЫааЙ§ГЬжаЕФЫйЖШЁЂЮЛвЦЛђзЊНЧЃЌгУгкЧ§ЖЏПижЦЯЕЭГЩшМЦЃЛМЦЫуИїВПМўЕФдЫЖЏЙпадСІЃЌгУгкаЃКЫЦфНсЙЙЧПЖШЁЃ
2.1 ЗТецФЃаЭ
НЈСЂЗТецФЃаЭЪБЃЌВЩгУADAMSНјааВњЦЗЕФЖЏСІбЇМЦЫуЃЌЛњаЕБлЕФЖЏСІбЇФЃаЭгЩMechanism/PROНгПкЕМГіЃЌИїВПМўЕФЙпСПЁЂжиаФЕШОЙ§Pro/EЩшМЦЙ§ГЬаЃбщЃЌПЩБЃжЄгыЪЕМЪВњЦЗЕФвЛжТадЃЛИїЙиНкЕФдЫЖЏИБдкADAMSжаНЈСЂЃЌжївЊгаа§зЊИБгыЛЌЖЏИБСНРрЁЃЛњаЕБлЖЏСІбЇФЃаЭШчЭМ3ЫљЪОЁЃ
ЭМ3 ЖЏСІбЇФЃаЭЭМ
2.2 Ч§ЖЏВЮЪ§
ЛњаЕБлАќКЌСЫжївЊЕФжБНгГаЪмЧ§ЖЏСІЕФдЫЖЏВПМўЃЌЦфжаЃКЬсЩ§ИзгЩвКбЙЯЕЭГЧ§ЖЏЃЌЦєЖЏгыжЦЖЏЪБМфОљПижЦдк5 sЃЌвддШМгЫйЗНЪНЦє/жЦЖЏЃЛЦфгрИїВПМўЕФдЫЖЏЙиНкОљВЩгУЕчЛњЧ§ЖЏЃЌЭЌбљдк5 sФкдШМгЃЈМѕЃЉЫйЦєЃЈжЦЃЉЖЏЁЃЕЋЪЧЃЌШчЙћгавтЭтЖЯЕчЕШЧщПіЗЂЩњЃЌЮоЗЈПижЦдШМѕЫйЭЃжЙЃЌЬсЩ§ИзаыдкгІМБвКбЙПижЦдЊМўЕФБЃжЄЯТ2 sФкПьЫйЭЃжЙЃЌа§зЊЙиНкаыдкжЦЖЏСІОиПижЦЯТПьЫйЭЃжЙЁЃСэЭтЃЌПьЫйжЦЖЏВњЩњЕФЙпадСІНЯДѓЃЌЖдЩшБИНсЙЙгаВЛРћгАЯьЁЃжївЊЧ§ЖЏВЮЪ§МћБэ1ЁЃЪЕМЪбнГіЪБЃЌЛњаЕБлЕФдЫЖЏВПМўЛсНјааВЛЭЌЕФзщКЯЖЏзїЃЌвдХфКЯбндБЕФБэбнЁЃВЛЭЌЖЏзїЖдЛњаЕБлНсЙЙЕФгАЯьВЛЭЌЃЌБОЮФзлКЯШЋВПЙиНкЦєЖЏЛђжЦЖЏЕФЖёСгЙЄПіЃЌНјааЖЏСІбЇМЦЫуЁЃЖЏзїДѓжТСїГЬШчЯТЃКslew#01ЫГЪБеыЦєЖЏЃЌslew#02ФцЪБеыЦєЖЏЃЌpitch#03ЯђЩЯЦєЖЏЃЌroll#01ЫГЪБеыЦєЖЏЃЌЧАБлpitch#02ЯђЩЯЦєЖЏЃЌliftЯђЩЯЦєЖЏЃЌИїЙиНкЦєЖЏВЂДяЕНЖюЖЈЫйЖШКѓЃЌе§ГЃМѕЫйжССуВЂПЊЪМЗДЯђЦєЖЏЃЌЗДЯђДяЕНЖюЖЈЫйЖШЃЈЮЛжУНгНќИУзДЬЌЦ№ЪМЮЛжУЃЉЪБЃЌИїЙиНквдБэ1жаЕФжЦЖЏСІОижЦЖЏЃЌгЭИзЪмПи2 sФкМѕЫйжС0ЁЃ
Бэ1 жївЊЧ§ЖЏВЮЪ§
2.3 МЦЫуНсЙћ
ОЙ§МЦЫуЃЌУПИідЫЖЏЙиНкОљПЩЕУЕНЧ§ЖЏЙІТЪЁЂЧ§ЖЏЃЈжЦЖЏЃЉСІОиЛђЧ§ЖЏЃЈжЦЖЏЃЉСІЁЂЦєЖЏЃЈжЦЖЏЃЉМгЫйЖШЁЂЦєЖЏЃЈжЦЖЏЃЉЮЛвЦЕШВЮЪ§ЃЌетаЉЪ§ОнПЩЮЊЩшМЦбЁаЭМАЧПЖШЗжЮіЬсЙЉвРОнЁЃвђШЋВПМЦЫуНсЙћЁЂЪ§ОнЁЂЧњЯпЕШаХЯЂСПНЯДѓЃЌЮоЗЈвЛвЛСаОйЃЌвдЯТНіСаГіLEDЦСЃЈа§зЊЙиНкroll#01ЃЉЕФЧ§ЖЏЙІТЪЧњЯпгыМгЫйЖШЧњЯпЃЌЗжБ№ШчЭМ4ЁЂЭМ5ЫљЪОЁЃдЫааЙ§ГЬжаЃЌЧ§ЖЏЙІТЪзюДѓжЕдМЮЊ3 kWЃЌПМТЧАВШЋгрСПЃЌбЁдё5.5 kWЕчЛњЃЛLEDЦСЕФзюДѓКЯГЩМгЫйЖШдМ0.9 ЁС9.8 m/s2ЃЌПЩзїЮЊЩшБИЧПЖШМЦЫуЕФвРОнЁЃ
ЭМ4 roll#01ЕФЙІТЪЧњЯп
ЭМ5 LEDЦСЕФМгЫйЖШЧњЯп
3 ОВСІбЇМЦЫу
НќФъРДЃЌОВСІбЇМЦЫувбдНРДдНЖрЕигІгУгкЙЄГЬЪЕМљжаЃЌПЩвдЗжЮіНЯЮЊИДдгЕФНсЙЙЃЌВЂЬсИпМЦЫуЕФОЋШЗадЃЌДгЖјУжВЙДЋЭГОбщЙЋЪНМЦЫуЕФВЛзуЃЌЮЊЩшМЦНзЖЮЕФЧПЖШаЃбщКЭНсЙЙгХЛЏЬсЙЉЯрЖдзМШЗЕФЗжЮівРОнЃЛЭЌЪБЃЌвВЪЙЖдаэЖрЮяРэбљЛњЮоЗЈЪЕВтЛЗНкЕФЗжЮіГЩЮЊПЩФмЁЃОВСІбЇМЦЫуЕФжївЊФПЕФгаЃКМЦЫуВЛЭЌЪмСІЪБИїСуВПМўЕФгІСІЗжВМЃЛМЦЫуИїСуВПМўЕФФгЖШгыЪмСІБфаЮЃЛМЦЫуНсЙЙЕФЮШЖЈадЃЛНсЙЙгХЛЏЁЃ
3.1 МЦЫуФЃаЭ
ВЩгУЙЄГЬМЦЫужаНЯЮЊЭЈгУЕФANSYSШэМўРДЭъГЩЛњаЕБлЕФОВСІбЇМЦЫуЃЌЦфзМШЗадШЁОігкМЦЫуФЃаЭЕФЧАЦкДІРэЁЂБпНчЬѕМўЕФЖЈвхКЭВФСЯЪєадЕФЩшЖЈЁЃПМТЧЕНPro/EбљЛњФЃаЭгыОВСІбЇМЦЫуФЃаЭЕФвЊЧѓгаЫљЧјБ№ЃКЧАепИќзЂжиФЃаЭгыЪЕМЪВњЦЗЕФвЛжТадЃЛКѓепдђДгШэМўМЦЫуЕФНЧЖШГіЗЂЃЌзЗЧѓвЛЖЈГЬЖШЕФКЯРэМђЛЏЃЌвдЦкЕУЕНИќИпаЇЁЂИќзМШЗЕФЧѓНтЁЃНЋЛњаЕБлЕФPro/EФЃаЭНјааТњзуANSYSвЊЧѓЕФДІРэКѓЃЌЕМГіЮЊПЩвдБЛANSYSШэМўЪЖБ№ЕФ*.igsЮФМўИёЪНЃЌЕМШыANSYSКѓЃЌдйНјааЭјИёЛЏДІРэВЂЖЈвхВФСЯЪєадЃЌЦфжївЊЪмСІВФСЯОљЮЊQ345BЃЈУмЖШЮЊ7850 kg/m3ЃЌЕЏадФЃСПЮЊ206 GPaЃЌВДЫЩБШЮЊ0.3ЃЉЁЃЭЈЙ§ЖЏСІбЇЗжЮіЕУЕНЕФдЫЖЏЙ§ГЬжаИїВПМўЕФЪмСІЪ§ОнЃЌЪЧОВСІбЇМЦЫуЕФПЩЪЉМгдиКЩЃЛИїВПМўЖРСЂМЦЫуЪБЃЌашЬсШЁВПМўИїСЌНгЕуЕФЪмСІЃЛећЬхМЦЫуЪБЃЌЮоашПМТЧВПМўжЎМфЕФЪмСІДЋЕнЃЌНіПМТЧећЬхЙпадСІМДПЩЁЃЖјЩшБИЕФОВСІбЇМЦЫуашПМТЧИїжждЫааЙЄПіЖјНјааДѓСПЕФМЦЫуЃЌвдЯТНіШЁЦфжавЛР§гУвдНщЩмДЫЩшМЦЗНЗЈЁЃЭЈЙ§ЖЏСІбЇМЦЫуЃЌЕУЕНLEDЦСдкжЦЖЏЙ§ГЬжаЕФзюДѓЙпадМгЫйЖШЮЊ0.9 ЁС9.8 m/s2ЃЌНЋИУжЕзїЮЊЧПЖШМЦЫуЕФЪЉМгдиКЩЁЃЛњаЕБлЕФећЬхМЦЫуФЃаЭМћЭМ6ЃЌЫўЬхСНЖЫЪЉМгЮЛвЦдМЪјЃЌLEDЦСЪЉМгЙпадМгЫйЖШ0.9 ЁС9.8 m/s2ЁЃ
ЭМ6 ЛњаЕБлећЬхМЦЫуФЃаЭ
3.2 МЦЫуНсЙћ
ОЙ§ANSYSЧѓНтЦїЕФМЦЫуЃЌПЩЕУЕНЛњаЕБлећЬхФЃаЭЕФБфаЮЮЊ58 mmЃЌжївЊЪЧНќ30 mЕФаќБлжЇГХФЉЖЫЕФЦСФЛЃЈзджи8 tЃЉВњЩњЕФФгЖШЃЌИУБфаЮСПЗћКЯЪЕМЪЩшМЦвЊЧѓЃЛЛњаЕБлЕФећЬхгІСІЮЊ57 MPaЃЌГіЯжзюДѓгІСІЕуЕФЮЛжУЪЧЬсЩ§гЭИзЖњзљИННќЃЌИУДІгаНгНќ6БЖЕФАВШЋЯЕЪ§ЃЌПЩТњзуЩшМЦАВШЋадвЊЧѓЁЃБфаЮЭМгыгІСІЭМЗжБ№ШчЭМ7ЁЂЭМ8ЫљЪОЁЃ
ЭМ7 ЛњаЕБлећЬхБфаЮЭМ
ЭМ8 ЛњаЕБлећЬхгІСІЭМ
ЯрЙиЮФеТ
- ЧГЬИДПКѓМЖЙІЗХгыЕЅЩљЕРЙІЗХЕФЬиЕу
- ЪвЭтЙуГЁЮшЬЈвєЯьЪАвєУюеа
- зівєЯьЕЦЙт вЊБмУтет"ЪЎзкзя"
- ЙигкЯпеѓСавєЯфЃЌФуЯыжЊЕРЕФЖМдкетРяЃЁ
- ЩљЗДРЁЕФдвђКЭЮЃКІ
- НтОіЪвФкбнГівєЯьГіЯжЛиЩљММЧЩ
- ЪвФквєЯьЯЕЭГЩшМЦЗНЗЈ
- ЛсвщЬќзюМбЛьЯьЪБМфЕФбЁдё
- вєЯфЕѕЙвМўАВзАЪОвтЭМ
- ЖрЙІФмЬќвєЯьЯЕЭГЕїЪдЃЌЙиМќЕудкФФЖљЃП
- вєЯьРЯЩеЕФОбщжЎЬИ
- ТѓПЫЗчЕФе§ШЗЪЙгУЙлФюгыММЧЩ
- ЦѓвЕМЖБ№ЪгЦЕЛсвщЯЕЭГЮхДѓШШУХММЪѕЯъНт
- ЛсвщЪввєЯьРЉЩљЯЕЭГШчКЮЩшМЦКЭбЁдёЃП






